
Robots have traditionally been purpose-built to perform a single, very specific task, but researchers from Beihang University are taking a much different approach with a new robotic drone that can operate underwater just as easily as in the air, and it features a clever, nature-inspired trick for maximizing its range.
When you think of robots, one of two versions probably comes to mind: the highly capable humanoids that science fiction has promised us, or the mindless articulated arms performing repetitive tasks in factories. The latter approach is more or less where we’ve been for decades, but as technology slowly catches up to the imaginations of sci-fi writers, robot designers are starting to develop automatons capable of performing a wider variety of actions. Boston Dynamics’ Spot, for example, uses four dog-like legs to navigate varied terrains and carry out many different missions, including protecting the ruins of Pompeii overnight and generating detailed 3D maps of areas too dangerous for humans to visit.
The adaptable approach makes it easier for companies or research organizations to justify the high cost of a robot, but what Beihang University’s Biomechanics and Soft Robotics Lab has created is truly unique. Even with highly articulated legs, Boston Dynamics’ Spot is still limited to missions on land. This new drone can carry out tasks either underwater, in the air, or both, without the need for modifications in between.

For most quadcopter drones, a water landing means the pilot is going to have to wade out to rescue it (and then replace most of its electronic components). This drone is different. It’s completely waterproof and features a set of self-folding propellers that collapse when operated at lower speeds underwater to efficiently maneuver the drone when submerged. They then automatically extend as the drone transitions out of the water and takes to the air. The researchers optimized the drone’s performance so that the water-to-air transition takes about a third of a second, and, like a pod of dolphins leaping out of the water, the drone is capable of repeated water-air transitions, performing seven of them consecutively during testing in roughly 20 seconds.
As with any electronic device, a robot’s autonomous capabilities are often limited by the capacity of its batteries, and that’s especially the case for flying drones that rely on four electric motors constantly spinning to stay aloft. In laboratory settings, you’ll often see advanced robots attached to cable tethers that provide a non-stop source of power, but that’s not a great option for bots designed to explore the ocean depths or collect aerial data—or both, in this case.
To dramatically increase the range of this drone, and to help conserve battery power while traveling to and from a mission site, the researchers gave it an additional upgrade inspired by the remora fish, better known as the suckerfish, which uses an adhesive disc on top of its head to temporarily attach itself to other underwater creatures in order to hitch a ride and conserve energy.
Drones that can land in order to carry out targeted observations while preserving battery life are not a new idea, but like robots in a factory, they typically use mechanisms tailored for specific surfaces, like articulated claws that grasp a branch or sticky gecko-inspired feet that stick to walls. For a robotic drone designed with flexibility in mind, the researchers wanted a more versatile way to attach to a variety of surfaces: wet, dry, smooth, rough, curved, or even those moving underwater, where the shear forces of the water require an extra-strong grip.
The remora fish’s sticky disc was the perfect solution, as it includes built-in redundancies that allow it to stay adhered to surfaces even with partial contact. Two years ago, Li Wen, one of the researchers and authors of the paper released today, was part of another research project at Beihang University that reverse-engineered how the remora fish’s disc actually worked.
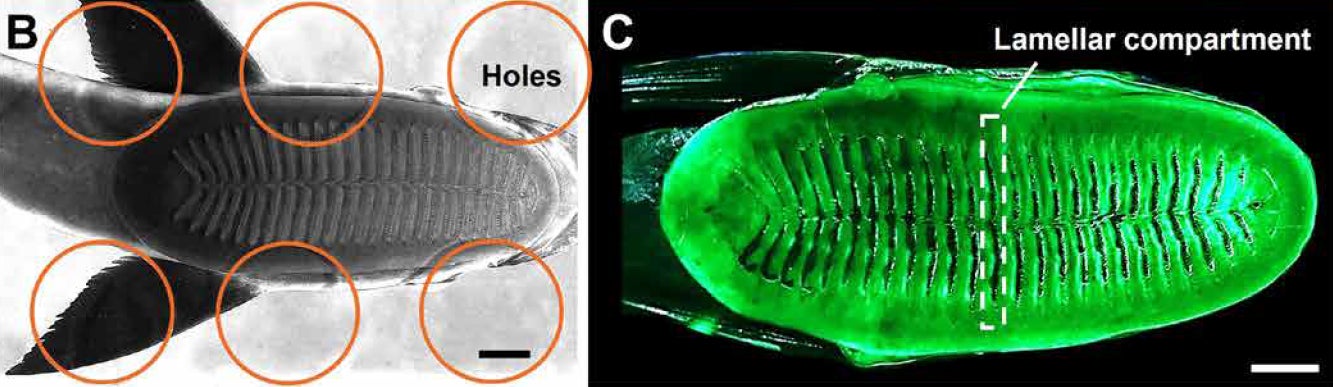
That research revealed that remora fish stick to surfaces very much like a suction cup does, with a flexible oval ridge of soft tissue that creates a tight seal. As water is squeezed out of the gap between the remora and its host, suction holds it in place. The surface of the remora fish’s disc is also covered in ridges aligned in columns and rows called lamellae (similar to the ridges you can feel on the roof of your mouth) that can be extended through muscle contractions to engage tiny spinules that further grip onto the host. Those lamellae ridges also help create smaller compartments of suction that maintain their seal even if the larger lip of the disc doesn’t. Unlike a suction cup, which releases its grip on a smooth surface when a small portion of its edge is lifted, a remora fish will still hold on.

The team was able to create an artificial version of the remora fish’s suction disc through a four-layer approach. They paired an ultraflexible layer on top with more rigid structures beneath, as well as a layer with a network of small channels that can be inflated when pumped full of liquid, replacing living muscle tissue as a way to engage the lamellae structures to further increase suction.
Installed atop the submersible drone, the suction mechanism allows it to adhere itself to a variety of surfaces, even if they have a rough texture, aren’t perfectly flat, or have a smaller surface area than the suction mechanism. Like a remora fish, the drone could, at least in theory, find itself an underwater host (one not immediately scared away by its spinning propellers) and attach itself for a free ride, requiring just the suction mechanism to be powered, which is a minimal drain on its onboard batteries. The same could be done in the air, although the challenges of the drone successfully attaching to another aircraft would be monumental, as even something as slow as a sailplane has a minimal speed of 40 mph: a challenging moving target.
A more plausible use of the suction mechanism is as a way to temporarily perch the drone somewhere with an ideal vantage point for long-term observations. Instead of relying on its four motors to maintain a specific position underwater while fighting moving currents, the drone could stick itself to a rock or log and switch off its motors, while still powering sensors and cameras. The same thing could be done above the water line, with the drone flying up and sticking itself to the side of a tall building or the underside of a wind turbine’s nacelle, and carrying out measurements and other data collection without the use of its battery-draining motors. It’s a solution to battery tech that’s still incredibly limited and sidesteps the need to fix the batteries themselves.





