When picking an object up, it takes humans a mere instant to know if they’ve grasped it properly, or if they need to adjust their grip so it’s more secure. Teaching robots how to properly pick something is a monumental task that might actually get a little easier—by making it harder to do.
https://gizmodo.com/these-self-learning-robot-arms-teach-each-other-how-to-1794029246
The easiest way to teach a robot how to pick something is to simply let it learn to pick up object after object by itself, trying different techniques and approaches each time to successfully move it from one location to another. After thousands of hours of this repetitive task, the software powering a robot can eventually learn how to reliably pick something up—but that doesn’t necessarily mean the grip it’s using is solid. Teaching robots to pick things up securely is important will help reduce the risk of something getting dropped, which could be both expensive and dangerous in a factory setting.
But how does a robot know when it has a secure grip on something? To help teach our future overlords the proper way to grasp objects, researchers at Carnegie Mellon University are using a novel approach: as one robot attempts to pick something up, a second robot is working to snatch the same object away.
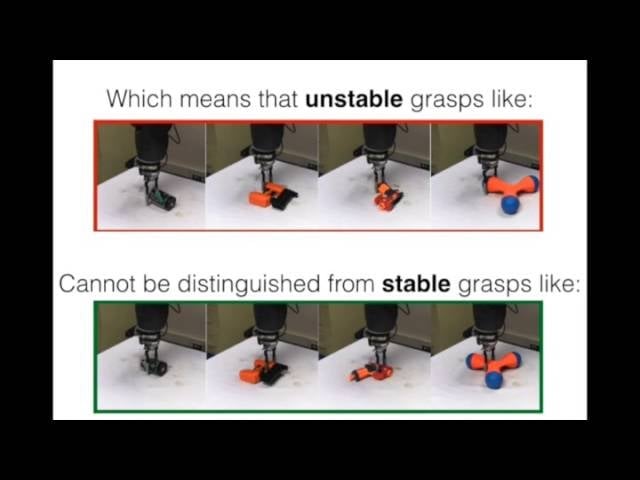
While one robot is tasked with picking up an object, its evil twin is programmed to try and grab it. If it can easily do so, more often than not, it means the way the first robot grasped the object wasn’t properly secure or stable. Through repetition, both robots are trying to get better and better at the job they’ve been programmed to do, but ultimately the approach will help teach robots the difference between a stable and unstable grasp on an object.
The research, presented at the 2017 International Conference on Robotics and Automation (ICRA) last week, also demonstrates how single robots can be programmed to make the grasping challenge even harder. Once an item has been picked up, the robot can shake it vigorously to test if its grip was secure. Using these “adversarial” techniques, as they’re called, can not only improve a robot’s ability to grasp items, it can also accelerate the entire learning process, which saves time and money. Most importantly, though, this research ensures the robots of the future will end up with a solid, confident handshake.
[YouTube via IEEE Spectrum]





